Bal-tec™ Home “Flabby”, A Kinematic Reality
“Flabby”, A Kinematic Reality
Vertical and off axis kinematic configurations present some unique challenges. Whitehead talked of the concept of “flabby” is as an established concept in 1930. It is the opposite of hard or rock hard. The best way to illustrate this rather nebulous characteristic is by contrast. A stiff high quality ball in contact with a stiff high quality flat surface is the nearest thing to a hard or invariable contact between two mechanical components that can be imagined. What is very important in this configuration is the perfect self alignment between these two geometries.
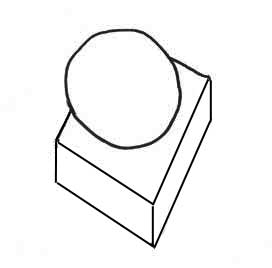
There is obviously elasticity between these two geometric components, and it will vary with the radius of the ball, the geometric and surface qualities of both parts, the stiffness of the two materials, and the force applied. Also, to a much lesser degree, to the ratio of the lateral to the longitudinal strains, but in the end, this is all very straightforward compression. If we contrast this with a ball forced into vertical contact with a flat but inclined prismatic face we have the first insight into “flabby”.
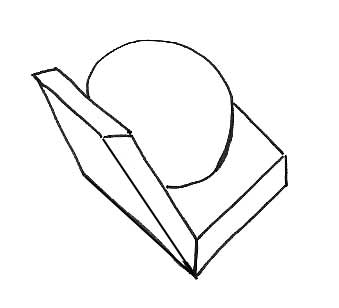
If we add a second inclined flat prismatic face, we generate a vee block. As soon as the descending ball comes into physical contact with one of the inclined flat faces of the vee block, there will be some Hertzian elastic deformation and, at some level, stiction sets in. As the ball slides down the flat prismatic face, it will eventually come into contact with the opposite inclined facet of the vee block. The final or end position of the ball will be the resultants of the counter vector forces applied to the ball by the vee block. This scenario is still quite straight forward, but it is slightly less deterministic than the simple sphere against a plane surface.
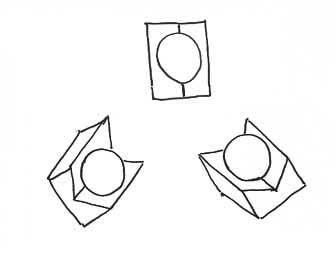
In conventional approaches of coping with vertical or inclined kinematic systems, the body of the vee blocks themselves are inclined at an angle to the central axis of the coupling. In this next step, with the inclined flat faces of the vee block inclined at an angle to the central axis of the coupling, a new set of vector variables come into play, and “flabby” becomes a major factor in the repeatability of the kinematic system. When you add two more vee blocks and two more spheres all inclined at angles to the central axis of the coupling, the determinability of this kinematic coupling becomes much more dependent on the payload, the preloading forces, the mechanical stiffness and overall geometry of the systems, as well as the surface quality of the component parts involved, (see Loosy).